


.jpg)





أنظمة ملاحة الأقمار الصناعية العالمية
الدكتور منصور أبو شريعة
العبادي \جامعة العلوم والتكنولوجيا الأردنية

لقد احتاج
البشر منذ نشأتهم إلى وسائل طبيعية وصناعية تساعدهم على تحديد الوقت والاتجاهات الجغرافية
أثناء السفر في البر والبحر وذلك لأغراض الترحال والتجارة وقد أطلق على
هذه الوسائل أنظمة الملاحة. فقد استعان البشر في البداية بمعالم تضاريس الأرض من جبال وأودية
وهضاب وأنهار وشواطيء وكذلك أجرام السماء من شمس وقمر وكواكب ونجوم لهدايته أثناء تنقله
في الأرض. ومن ثم قام علماء البشر على مر التاريخ باختراع أجهزة ملاحة مختلفة
تقوم بتحديد الوقت والاتجاهات الجغرافية بدقة أكبر من الوسائل الطبيعية حيث تم
اختراع المزولة أو الساعة الشمسية قبل ما يزيد عن خمسة الآف سنة لتحديد الوقت خلال
النهار وكذلك الاتجاهات الجغرافية. أما البوصلة فقد تم اختراعها واستخدامها قبل ألفي
عام تقريبا من قبل الصينيين لتحديد اتجاه
الشمال المغناطيسي. وقد تم اختراع واستخدام آلة
السدس أو السدسية قبل
ألف سنة من قبل المسلمين لقياس الزاوية بين أي جرمين سماويين والإستفادة منها في تحديد
خطوط الطول والعرض والاتجاه . أما الأَسْطُرلاب
فقد تم اختراع أول أشكاله على يد
العلماء اليونايين في القرن الأول قبل الميلاد ثم قام العلماء المسلمون بتطوير قدراته واختراع كثيرا من أنواعه ابتداءا
من القرن الثامن الميلادي. وقد أدى اختراع
أول جهاز لتوليد الموجات الكهرومغناطيسية في عام 1889م على يد الفيزيائي الألماني هاينريش هرتز إلى ظهور تطبيقات كثيرة ساهمت في تسهيل حياة البشر وزيادة
رفاهيتهم ومن هذه التطبيقات البالغة
الأهمية هو استخدامها في أنظمة ملاحة حديثة دقيقة بدأت بأنظمة الملاحة الراديوية في بداية القرن العشرين وانتهت بأنظمة ملاحة
الأقمار الصناعية العالمية مع نهايته.

تحتاج أنظمة
ملاحة الأقمار الصناعية العالمية لتغطية
كامل سطح الأرض إلى كوكبة من الأقمار الصناعية يتم توزيعها بانتظام على عدة مدارات دائرية. ولقد
تم اختيار مدارات أرضية متوسطة بارتفاع عشرين
ألف كيلومتر تقريبا لمعظم أنظمة ملاحة الأقمار الصناعية حيث تحتاج هذه الأنظمة إلى كوكبة مكونة من 24 قمرا صناعيا بحيث يضمن
وجود أربعة أقمار ضمن مجال الرؤيا المباشرة لجهاز الاستقبال. ويتم تحديد إحداثيات الموقع في هذه الأنظمة من
خلال جهاز استقبال يستلم إشارات راديوية
من مرسلات أربعة أقمار صناعية تحمل كل من هذه الإشارات معلومات عن موقع القمر بالنسبة لسطح الأرض وكذلك
توقيت إرسال الإشارة بدقة عالية باستخدام ساعات ذرية عالية الدقة تحملها هذه
الأقمار. ويقوم جهاز الإستقبال بحساب المسافة بين موقعه وبين مواقع الأقمار ومن ثم
يتم تحديد الموقع باستخدام طريقة التثليث الخطي (Trilateration). ويوجد في الوقت الحالي عدة أنظمة ملاحة
باستخدام الأقمار الصناعية أهمها وأكثرها استخداما نظام التموضع العالمي أو الجي
بي أس ( (GPS الأمريكي والذي بدأ تشغيله جزيئا للأغراض
العسكرية في عام 1978م وأصبح متاحا
للإستخدامات المدنية في عام 1994م في جميع أنحاء العالم. أما النظام الثاني
فهو نظام جلوناس الروسي (GLONASS الذي بدأ العمل بإنشائه في عام 1982م وتم تشغيله في عام 1995م. أما النظام الثالث
فهو نظام جاليليو (Galileo) التابع للاتحاد الأوروبي والذي بدأ العمل على
إنشائه في عام 2011م وتم تشغيله جزئيا في عام 2016م وبشكل كامل في عام 2022م. أما
النظام الرابع فهو نظام بايدو (BeiDou) للملاحة بالأقمار الصناعية الخاص بالصين والذي بدأ العمل بالجيل
الأول منه في عام 2000م لتقديم الخدمة
للصين فقط وتم في عام 2020م تشغيل الجيل الثالث منه لتقديم خدمة عالمية. أما النظام الخامس فهو
النظام الهندي (IRNSS) وهو نظام إقليمي للملاحة بالأقمار الصناعية يغطي المنطقة الهندية وبعض الدول المجاورة .
.png)
وعلى
الرغم من أن أنظمة ملاحة الأقمار الصناعية تم إنشائها لأغراض
عسكرية بحتة من قبل الأمريكان والروس لتوفير أنظمة ملاحة عسكرية لمساعدة الطائرات والقاذفات الحربية والصواريخ
البالستية والسفن والغواصات البحرية للوصول إلى أهدافها بدقة في مختلف الأحوال
الجوية إلا أنها أصبحت متاحة للتطبيقات المدنية لجميع البشر مع نهاية القرن
العشرين. ويمكن للمستخدم المدني لأنظمة ملاحة الأقمار
الصناعية تحديد إحداثيات موقعه الثلاث وهي خطي الطول والعرض والارتفاع وكذلك اتجاه
سيره وسرعته بالإضافة إلى تزويده بالوقت الدقيق المظبوط بالساعات الذرية وذلك لأي مكان على سطح الأرض وفي الفضاء المحيط بالأرض الذي يقع ضمن تغطية هذه
الأقمار. وتستخدم هذه الأنظمة في أنظمة
ملاحة الطائرات والسفن والبواخر ومختلف أنواع المركبات وحتى الأفراد حيث يمكنها تحديد الموقع بدقة
عالية تصل لعدة أمتار في التطبيقات المدنية وعدة سنتيمترات للتطبيقات العسكرية. ويمكن زيادة قدرات أنظمة تحديد المواقع الجغرافية من خلال دمج نظام
تحديد المواقع العالمية مع تقنيات التموضع في شبكات الهاتف الجوال وإنترنت الأشياء وتحليلات البيانات الضخمة وذلك
لتوفير معلومات تنقل أكثر دقة لأنظمة
الملاحة في مختلف وسائل النقل. وتستخدم
هذه الأنظمة في تطبيقات لا حصر لها في أنظمة المساحة وأنظمة مراقبة الطقس والمناخ ورسم الخرائط ثنائية
وثلاثية الأبعاد عالية الدقة وأنظمة
التتبع وأنظمة القيادة الذاتية للسيارات والطائرات وفي مجالات الجيولوجيا
والجيوديسيا وقياسات التصدعات الأرضية وحركة
الرمال والقارات . ومن التطبيقات المستقبلية لهذه الأنظمة
هو دمجها مع أنظمة الذكاء الاصطناعي والتعلم الآلي والذي سيؤدي إلى ثورة في مجالات مختلفة كالملاحة
الذاتية والملاحة ثلاثية الأبعاد والاستشعار عن بعد والتحليلات التنبؤية والملاحة
السحابية والصوتية. فأنظمة الملاحة
السحابية والاستشعار عن بعد توفر للمستخدم تنقلا أكثر أمانا وموثوقية حيث يتم
الاستفادة من المعلومات الجغرافية والملاحية المخزنة عن المناطق المحيطة من خلال
مراقبة الطقس وتضاريس الأرض والمباني وحركة
السفن والطائرات والمركبات والأفراد باستخدام أجهزة الاستشعار المختلفة كالكاميرات
والحساسات وأنظمة الرادار.
أما الخدمة التي تقدمها أنظمة ملاحة الأقمار
الصناعية ولا تقل أهمية عن خدمة تحديد المواقع فهي تزويد المستخدمين بأنظمة توقيت
بالغة الدقة.تعتمد على
الساعات الذرية وبدقة قد تصل إلى جزء من بليون جزء من الثانية في اليوم أي أنها تتغير
بمقدار ثانية واحدة في كل ثلاثة ملايين سنة تقريبا . فالأقمار الصناعية في هذه الأنظمة تحمل ساعة ذرية واحدة أو أكثر على متنها
تعمل على تحديد التوقيت الدقيق عند إرسال مواقعها إلى الأجهزة الأرضية. وتستخدم
أنظمة التوقيت بالغة الدقة المرسلة من الأقمار الصناعية في جميع أنواع شبكات الاتصالات والحواسيب
المحلية والاقليمية والعالمية كشبكات الهواتف الجوالة وشبكات الألياف الضوئية وذلك
لتقليل معدلات الخطأ عند نقل الإشارات الرقمية وكذلك زيادة معدلات النقل حيث تصل
إلى ما يزيد عن مائة جيقابت في الثانية في بعض الأنظمة. وتستخدم أنظمة التوقيت الدقيقة في شبكات نقل
الطاقة الكهربائية مما زاد من تقليل
معدلات الفشل والأعطال في هذه الشبكات
وزيادة كفاءة نقل الطاقة وكذلك تثبيت قيم الجهد والتردد. وتستخدم هذه الأنظمة في ظبط الساعات بدقة عالية في
مختلف القطاعات كما في قطاع البنوك وشبكات نقل الأموال والمستندات والصرافات
الآلية وقطاعات الطيران ومختلف وسائل
النقل وقطاعات الزراعة والتجارة والصناعة وأنظمة المعايرة والمقاييس ومحطات البث
الراديوي والتلفزيوني ومحطات رصد الطقس
والمناخ والزلازل وغيرها الكثير.

وَعَلَامَاتٍ
وَبِالنَّجْمِ هُمْ يَهْتَدُونَ
لقد استعان الإنسان منذ فجر التاريخ
ولا زال بمعالم تضاريس الأرض من
جبال وأودية وهضاب وأنهار وشواطيء وكذلك
أجرام السماء من شمس وقمر وكواكب ونجوم
لهدايته أثناء تنقله في الأرض طلبا للرزق والتجارة والترحال في البر والبحر
والجو. ولقد أشار القرءان الكريم لوسائل
الملاحة الطبيعية التي سخرها الله عز وجل للبشر
فقال عز من قائل (وَعَلَامَاتٍ
وَبِالنَّجْمِ هُمْ يَهْتَدُونَ (16)) النحل والقائل سبحانه (وَجَعَلْنَا
فِيهَا فِجَاجًا سُبُلًا لَعَلَّهُمْ يَهْتَدُونَ (31)) الأنبياء والقائل سبحانه (وَهُوَ الَّذِي جَعَلَ لَكُمُ النُّجُومَ لِتَهْتَدُوا بِهَا
فِي ظُلُمَاتِ الْبَرِّ وَالْبَحْرِ قَدْ فَصَّلْنَا الْآيَاتِ لِقَوْمٍ
يَعْلَمُونَ (97)) الأنعام.
وتعتبر الجبال الشاهقة والفجاج الواسعة بأشكالها المختلفة من أكثر العلامات التي يستدل بها البشر على تحديد طرق سيرهم في
الأرض. ولقد أشار القرءان الكريم إلى أهمية الشمس والقمر في حساب الأوقات والتواريخ في
عدة آيات منها قوله تعالى (فَالِقُ الْإِصْبَاحِ
وَجَعَلَ اللَّيْلَ سَكَنًا وَالشَّمْسَ وَالْقَمَرَ حُسْبَانًا ذَلِكَ تَقْدِيرُ
الْعَزِيزِ الْعَلِيمِ (96)) الأنعام. وتعتبر الشمس أهم نظام توقيت وملاحة طبيعي استخدمه
البشر في النهار بدون الحاجة إلى أجهزة
الملاحة الصناعية حيث يمكنهم تحديد ساعات
النهار من خلال موقعها في السماء وتحديد اتجاه الشمال وبقية الاتجاهات بدقة عالية
عند وقت الزوال وتحديد أيام وشهور السنة من أماكن شروقها وغروبها أو ميلان مدارها
في السماء. أما القمر فقد استخدمه البشر
لتحديد بداية الأشهر القمرية وتحديد أيام الشهر من خلال مراقبة موقع وشكل القمر عند غياب الشمس مصداقا لقوله تعالى (هُوَ الَّذِي جَعَلَ الشَّمْسَ ضِيَاءً وَالْقَمَرَ نُورًا وَقَدَّرَهُ
مَنَازِلَ لِتَعْلَمُوا عَدَدَ السِّنِينَ وَالْحِسَابَ مَا خَلَقَ اللَّهُ ذَلِكَ
إِلَّا بِالْحَقِّ يُفَصِّلُ الْآيَاتِ لِقَوْمٍ يَعْلَمُونَ (5)) يونس. واستخدم البشر النجم القطبي لتحديد إتجاه الشمال
الجغرافي بدقة عالية أثناء الليل وكذلك
تحديد مقدار دائرة العرض في النصف الشمالي للأرض من خلال قياس زاوية ارتفاعه عن
الأفق والتي تساوي قيمتها قيمة دائرة العرض. أما البروج الاثني عشر والموزعة بانتظام على محيط
دائرة البروج فقد استخدمها البشر لتحديد
أشهر السنة الشمسية من خلال مواقعها
النسبية لموقع الشمس. وبما أن خارطة النجوم
في السماء تتغير مع تغير موقع الأرض في
مدارها حول الشمس فقد استفاد البشر من المواعيد
التي تطلع فيها النجوم كالشعرى وسهيل والثريا لتحديد فصول السنة الشمسية ومواسم الشتاء والزراعة وغيرها.

خطوط الطول والعرض الجغرافية
لقد أدى
اختراع نظام إحداثيات لسطح الأرض الكروية قبل ما يزيد عن الفي سنة من قبل العلماء اليونانيين إلى تسهيل عملية
تحديد المواقع الجغرافية وتحديد مواقع السفن وغيرها من وسائل النقل. ونظام الإحداثيات هذا هو شبكة وهمية من خطوط
الطول والعرض تتقاطع فيه دوائر العرض وخطوط الطول بزوايا قائمة ويستخدم لتحديد
المواقع على سطح الأرض عند تقاطعات هذه الخطوط. فخطوط الطول (Longitudes) هي عبارة عن أنصاف دوائر تتقاطع عند
القطبين وتغطي ما مقداره
360 درجة وهي خطوط غير متوازية حيث تتلاقى عند الأقطاب وهذا يعني أنها لا تحافظ
على المسافة بينها فهي أعلى ما تكون عند خط الاستواء وتقل تدريجيا باتجاه الأقطاب حتى تصل إلى الصفر.
وتحافظ خطوط الطول على فرق الزمن بينها رغم عدم تساوي المسافة بينها حيث يبلغ
الفرق أربعة دقائق زمنية لكل درجة طول أو
ساعة واحدة لكل 15 درجة طول. ويعتبر خط
غرينتش المار بالمرصد
الفلكي في مدينة غرينتش قرب لندن خط الطول
المرجعي أو الرئيسي بدرجة الصفر وتقاس
الخطوط منه إلى الشرق حتى تصل إلى 360 درجة عند وصولها إلى خط
غرينتش من الغرب. وعادة ما تقاس خطوط الطول بمقدار
الدرجات الزاوية إما شرق أو غرب خط غرينتش
حتى 180 درجة. أما دوائر العرض (Latitudes) فهي
دوائر وهمية متوازية يبلغ مداها 180 درجة تقاس من خط الاستواء الذي ينصف الكرة الأرضية
إلى نصفين متساويين شمالي وجنوبي بحيث يقع القطب الشمالي عند درجة عرض 90 شمالا
بينما يقع القطب الجنوبي عند درجة عرض 90 جنوبا.
وتحافظ خطوط العرض على المسافة بينها على العكس من خطوط الطول حيث تبلغ
المسافة بين خطي عرض 111 كيلومتر تقريبا لكل درجة زاوية. ولأغراض الدقة تقاس خطوط الطول والعرض بالدرجات
والدقائق والثواني الزاوية حيث تبلغ الدقة في قياس المسافة بين خطوط العرض ثلاثين
متر تقريبا لكل ثانية زاوية بينما تبلغ الدقة في قياس الزمن بين خطوط الطول 67
ميكروثانية زمنية تقريبا لكل ثانية زاوية.
لقد كان من السهل على العلماء اليونانين ومن تبعهم تحديد دوائر العرض لأي مكان على
سطح الأرض من خلال قياس زاوية ارتفاع النجم القطبي عن الأفق باستخدام الآلات
الفلكية كالسدسية والأسطرلاب حيث تتساوي زاوية خط العرض مع زاوية
ارتفاع النجم القطبي. أما تحديد خطوط الطول فقد كان أكثر صعوبة في غياب
وجود الساعات الزمنية الدقيقة في ذلك الزمن حيث أنه يمكن تحديد الفرق بين خطي طول على نفس
دائرة العرض من خلال قياس فرق الزمن بينهما. لقد كان الفلكي والرياضي المسلم محمد بن جابر بن سنان البتاني أول من قاس الفرق
بين خطي طول مدينتي الرقة وأنطاكيا باستخدام ظاهرة خسوف القمر وذلك في القرن
التاسع الميلادي . وقام علماء الفلك من بعده باستخدام ظواهر فلكية مختلفة كمنازل القمر والاقترنات بين
الكواكب لتحديد خطوط الطول لمدن مختلفة إلى أن تم اختراع الساعات الدقيقة
واستخدامها لتحديد خطوط الطول لأي مكان على سطح الأرض بدقة عالية كما في نظام الجي بي أس.

المزولة والبوصلة والسدسية
والأسطرلاب
حاول البشر لحاجتهم الماسة
إلى السفر في الصحارى والبحار والمحيطات لأغراض الترحال والتجارة اختراع أجهزة ملاحة
تقوم بتحديد الوقت والاتجاهات الجغرافية والتي
تساعدهم على تحديد اتجاهات سير قوافلهم وسفنهم. وتعتبر
المزولة أو الساعة الشمسية ( sundial ) أول ساعة وأداة
ملاحة اخترعها الإنسان قبل ما يزيد عن خمسة آلاف سنة ورغم
بساطتها فإنها تقوم بمهام متعددة في أنظمة
التوقيت والملاحة في البر والبحر وحتى في الجو في التطبيقات الحديثة. وتتكون المزولة في أبسط أشكالها من عصا خشبية
أو قضيب معدني يتم تثبتيتها بشكل رأسي على
قاعدة مستوية عريضة يتم تدريجها بقيم
الساعات والاتجهات وأيام السنة وقرءاتها عند مرور الظل عليها. وعادة ما يتم
استبدال القضيب بصفيحة خشبية أو معدنية رقيقة على شكل مثلث قائم الزاوية بحيث يكون
ظلها أدق ما يكون عند زوال الشمس. إن أول استخدمات المزولة هو كساعة تقوم بتحديد
الوقت أثناء النهار حيث يدور ظل مؤشر
المزولة مع دوران الشمس الظاهري ويتم تدريج الأوقات بالساعات والدقائق على رأس خطوط شعاعية مركزها عند المؤشر يتم رسمها
على قاعدة المزولة. أما الإستخدام الثاني
للمزوله فهو تحديد الأيام والشهور في السنة الشمسية وذلك من خلال قياس طول الظل
عند الزوال حيث يكون الظل أقصر ما يكون
عند الإنقلاب الصيفي في 21 حزيران وأطول
ما يكون عند الإنقلاب الشتوي في 21 كانون
أول ومن ثم يتم تدريج الخط الشعاعي للزوال ببقية أيام السنة. ويمكن استخدام
المزولة كبوصلة تحدد اتجاه الشمال الجغرافي بدقة عالية وذلك من خلال تدوير قاعدة
المزولة حتى يصبح ظل المؤشر أقصر ما يكون عند لحظة زوال الشمس والتي يتم تحديدها
من ساعة مستقلة وعندها يكون اتجاه الظل هو اتجاه الشمال الحقيقي. وتستخدم المزولة كذلك لتحديد خط العرض وذلك من خلال قياس زاوية ميل أشعة الشمس عند
الاعتدال الربيعي أو الخريفي حيث تساوي قيمة خط العرض حاصل طرح زاوية الميل من تسعين
درجة . وقد استخدم الفلكي والرياضي اليوناني إراتوستينس المزولة لقياس محيط الأرض حيث قام في 21 يونيو من 250 ق.م وهو تاريخ الانقلاب الصيفي بقياس زاوية
ميل أشعة الشمس في أسوان والتي كانت عمودية
بينما كانت في الأسكندرية 7.5 درجة ومن ثم قام بحساب محيط الأرض بعد قياس المسافة بين
المدينتين فكانت النتيجة بفرق 430 كم
عن القيمة الصحيحة وهو 40120 كم.

أما البوصلة (compass) فقد تم اختراعها واستخدامها
قبلي ألفي عام تقريبا من قبل الصينيين لتحديد اتجاه الشمال المغناطيسي القريب من
الشمال الجغرافي. وعلى الرغم من أن الصينيين
هم أول من عرف البوصلة إلا أن الفضل يعود للمسلمين العرب في تصنيع أول أشكال
البوصلات العملية واستخدامها في الملاحة البرية والبحرية في القرن الثاني عشر
الميلادي. وفي القرن
الرابع عشر اخترع الفلكي ابن
الشاطر في القرن الرابع عشر الميلادي بوصلة تجمع بين ساعة شمسية عالمية
وبوصلة مغناطيسية لتحديد الاتجاه إلى مكة المكرمة وأوقات الصلوات. وتتكون
البوصلة في شكلها الحالي من إبرة حديدية رقيقة ممغنطة وتدور بحرية تامة على محور
ارتكاز في منتصفها بحيث يشير أحد طرفيها إلى القطب الشمالي المغناطيسي والآخر إلى
القطب الجنوبي المغناطيسي عند تفاعلها مع المجال المغناطيسي للأرض. ويتم تدريج
محيط سطح البوصلة بزوايا الاتجاه بالدرجات بحيث تكون زاوية الصفر باتجاه الشمال و
زاوية 90 باتجاه الشرق وزاوية 180 باتجاه الجنوب و 270 باتجاه الغرب. ويمكن معرفة
اتجاه الشمال الجغرافي من اتجاه الشمال المغناطيسي من خلال معرفة الفرق بينهما
والذي يعتمد على خط الطول حيث يكون صفرا عند خط طول معين ويزداد تدريجيا كلما ابتعدنا عن هذا الخط والذي قد يصل
إلى عدة درجات. وفي القرن العشرين تم اختراع أنواع
جديدة من البوصلات التي لا تعتمد على المجال المغناطيسي للأرض وتعطي اتجاه الشمال الجغرافي وأهمها البوصلة
الجيروسكوبية
(gyrocompass) وهي بوصلة تعمل
وفق مبدأ التأثير الجيروسكوبي حيث يحافظ قرص معدني ثقيل يدور بسرعات عالية على
اتجاه محور الدوران وقد تم استخدام هذه البوصلة على نطاق واسع في السفن والطائرات.
أما بوصلة الجي بي أس (GPS compasses) فتستخدم المعلومات المستلمة من أنظمة ملاحة
الأقمار الصناعية لحساب وتحديد اتجاه الشمال الجغرافي بدقة عالية ورسم بوصلة
الكترونية على شاشات الهواتف الذكية
والحواسيب.
.jpg)
وتم استخدام آلة
السدس أو السدسية (sextant) لقياس الزاوية بين أي جرمين سماويين أو بين الجرم السماوي
واتجاه الأفق والإستفادة منها في تحديد
خطوط الطول والعرض والاتجاه عند قياس زاوية الشمس عند الزوال أو زاوية النجم
القطبي . وينسب اخترع السدسية إلى الفلكي المسلم أبو محمود
الخجندي في القرن العاشر الميلادي وجرى عليها تطويرات
كثيرة لزيادة كفاءة قياساتها وقدراتها وكانت السدسية أداة الملاحة الرئيسية في السفن والطائرات حتى منتصف القرن العشرين.. وتتكون السدسية من ذراعين أحدهما ثابت والأخر متحرك على قوس
مدرج بقيم درجات زاوية القياس بحد ستين درجة أي سدس الدائرة ويوجد مرآتين أحدهما
ثابتة وهي مرآة الأفق مثبتة على الذراع الثابت أما المرآة الثانية هي مثبتة على
ذراع أو دليل المؤشر وتسمى مرآة الدليل وعادة ما يستخدم التلسكوب مع السدسية لتوضيح خط الأفق. يتم إمساك
السدسية بحيث يكون القوس بشكل رأسي ويظهر الأفق على مرآة الأفق ثم يحرك الذراع
الدليلي حتى تبدو صورة الشمس أو القمر أو النجم منعكسة على مرآة الدليل وملامسة لخط
الأفق ثم يتم قراءة ارتفاع الجرم من القوس المدرج.
.jpg)
الأَسْطُرلاب Astrolabe) ) أو
ذات الصفائح هو آلة فلكية معقدة تم اختراع
أول أشكاله على يد العلماء اليونايين في
القرن الأول قبل الميلاد ثم قام العلماء المسلمين العرب بتطوير قدراته واختراع
كثيرا من أنواعه كالإسطرلاب التام والمسطح
والهلالي والزورقي والمبطح وذلك ابتداءا من القرن الثامن الميلادي. والأسطرلاب هو نموذج ثنائي البعد للقبة
السماوية ثلاثية الأبعاد حيث تم من خلال الإسقاط رسم دائرة البروج ومدارات الجدي والسرطان ودائرة الأفق
المحلي وخطوط العرض على وجه صفائح الأسطرلاب
بحيث يسهل إيجاد مواضع الأجرام السماوية عليها. وقد كانت الأسطرلابات حواسيب فلكية تناظرية تحل
المسائل المتعلقة بأماكن الأجرام السماوية مثل الشمس والقمر والنجوم على القبة السماوية واستخراج
الاتجاهات والأوقات منها. واستخدم
االعلماء المسلمون الاسطرلاب لقياس الزوايا والارتفاعات لأغراض الملاحة وتحديد
الاتجاهات وخاصة اتجاه القبلة وتقدير الوقت في النهار والليل وتحديد أوقات شروق
وغروب الشمس والقمر وبعض النجوم وتحديد أوقات الصلوات الخمس ومعرفة بدايات الشهور
القمرية. ويتكون الإسطرلاب من قرص دائري مجور يسمى الأم يكفي لاحتواء واحد أو أكثر من الصفائح المعدنية المسطحة
بعضها ثابت وبعضها متحرك ويتم تدريج حافة الأم بالساعات الزمنية والدرجات الزاوية. ويوجد على الجزء الخلفي من الأم جداول ومنحنيات
لتحويلات الوقت واليوم من الشهر من موضع الشمس على مسار الشمس وجداول المثلثات. أما الصفائح
فهي عبارة عن أقراص متعددة رسمت عليها منحنيات تسمى السموت والمقنطرات تمثل أفق
العرض الجغرافي للبلد المراد استخدام الإسطرلاب فيه وثلاثة دوائر متمركزة تمثل
مدارات السرطان والجدي ودائرة البروج أو الاستواء. أما الشبكة أو العنكبوت فهي شبكة قابلة للدوران حول محور
الإسطرلاب وتحوي نتوءات تمثل مواقع بعض الكواكب والننجوم المعروفة كما تحوي على دائرة
البروج التي يجب أن تبقي على حالة تماس مع كل من مداري السرطان والجدي أثناء
الدوران. أما العضادة فهي مؤشر دقيق مستطيل الشكل بطول يساوي قطر الإسطرلاب وتدور حول محوره ولها
نهايتان مدببتان تؤمنان دقة عالية لقراءة الزاوية
وكذلك ثقبان في النهايتين للتسديد الدقيق عند رصد الكواكب والنجوم.

أنظمة الملاحة الراديوية
لقد أدى
اختراع أول جهاز لتوليد الموجات الكهرومغناطيسية في عام 1889م على يد الفيزيائي الألماني هاينريش هرتز (Heinrich Hertz) إلى ظهور تطبيقات
كثيرة ساهمت في تسهيل حياة البشر وزيادة رفاهيتهم كأنظمة البث
الراديوي والتلفزيوني وأنظمة نقل مختلف
أنواع المعلومات لاسلكيا كإشارات التلغراف
والتلفون والتحكم
والقياس وغيرها.
ومن التطبيقات البالغة الأهمية للموجات الكهرومغناطيسية هو استخدامها في
أنظمة ملاحة حديثة دقيقة بدأت بأنظمة الملاحة الراديوية (Radio Navigation) وانتهت بأنظمة ملاحة الأقمار الصناعية العالمية Global Navigation Satellite Systems (GNSS))). كان
أول أنواع الملاحة الراديوية ظهورا هو محدد الإتجاه الراديوي (Radio direction finding) حيث يمكن باستخدام
هوائيات موجهة (directional antennas) تحديد اتجاه مكان مرسل
الموجات الكهرومغناطيسية. ويمكن كذلك تحديد موقع المرسل وبعده عن مكان القياس إذا
تم تحديد الإتجاه من مكانين أو أكثر بعد قياس المسافات بينها وذلك باستخدام طريقة
التثليث (Trianglation)
المستخدمة في أنظمة المساحة.
وفي بداية القرن العشرين تم إنشاء
محطات بث راديوية بترددات منخفضة وتبث في جميع الاتجاهات لهداية الطائرات والسفن في المطارات والموانيء
. وقد تم تطوير النظام السابق بنظام محدد الإتجاه الراديوي المعاكس (Reveres radio direction finding) حيث
تستخدم محطة البث هوائي موجه يدور بمعدل محدد ويبث رسائل مكونة من شيفرة
مورس (Morse code)
بشكل دوري بينما تستخدم
الطائرات والسفن هوائيات غير موجهة وتحديد الاتجاهات من الإشارات التوقيتية لمحطة
البث. تم استخدام هذا النظام من قبل
الألمان في عام 1907م ومن ثم تم تطويره من قبل الانجليز والأمريكان واستخدامه في
التطبيقات المدنية والعسكرية. وخلال الحرب العالمية الثانية قامت الولايات المتحدة
الأمريكية بتطوير نظام ملاحة قصير المدى عالي
التردد للطائرات (VHF omnidirectional range, or VOR) وفي هذا النظام تقوم المحطة
ببث حامل عالي التردد يحمل إشارتين أحدهما
مرجعية تحدد هوية المحطة والأخرى تحدد اتجاه البث باستخدام فرق الطور بين
الإشارتين تستخدمه الطائرات لتحديد
الاتجاه نحو هذه المحطة. لقد تم إنشاء
عشرات الألاف من هذه المحطات في جميع مطارات العالم وأصبح النظام هو السائد
والمستخدم حتى بداية القرن الواحد والعشرين مع التحول إلى نظام الجي بي أس. وفي الثلاثينات من القرن العشرين ظهرت أنظمة
الملاحة الشعاعية (beam
navigation systems)
وأنظمة الهبوط المجهزة (instrument
landing system)
وأنظمة الهبوط المستجيبة ( transponder
landing system)
التي تساعد الطائرات في الهبوط على المدرجات في الليل وفي الأحوال الجوية السيئة.
وخلال
الحرب العالمية الثانية تم تطوير أنظمة الملاحة طويلة المدي للطائرات والسفن ومن
أهمها أنظمة ملاحة القطع الزائد (Hyperbolic
navigation ) حيث
تقوم محطات الملاحة بإرسال نبضات راديوية متزامنة أو موجات لها نفس الطور
ويقوم المستقبل بتحديد موقعه عند استلام إشارتين أو أكثر من هذه المحطات . ومن هذه الأنظمة النظام البريطاني جي (GEE) الذي وصل مداه 700 كيلومتر
والنظام الأمريكي لوران (LORAN) الذي وصل مداه إلى 1000
كيلومتر فوق البر و 2400 كيلومتر فوق
البحر وقد تم إنشاء محطات لوران بحيث تغطي أجزاء كثيرة من سطح الأرض وبدقة وصلت
الى مئات الأمتار وبقي النظام عاملا حتى
نهاية القرن العشرين بعد ظهور أنظمة ملاحة الأقمار الصناعية.

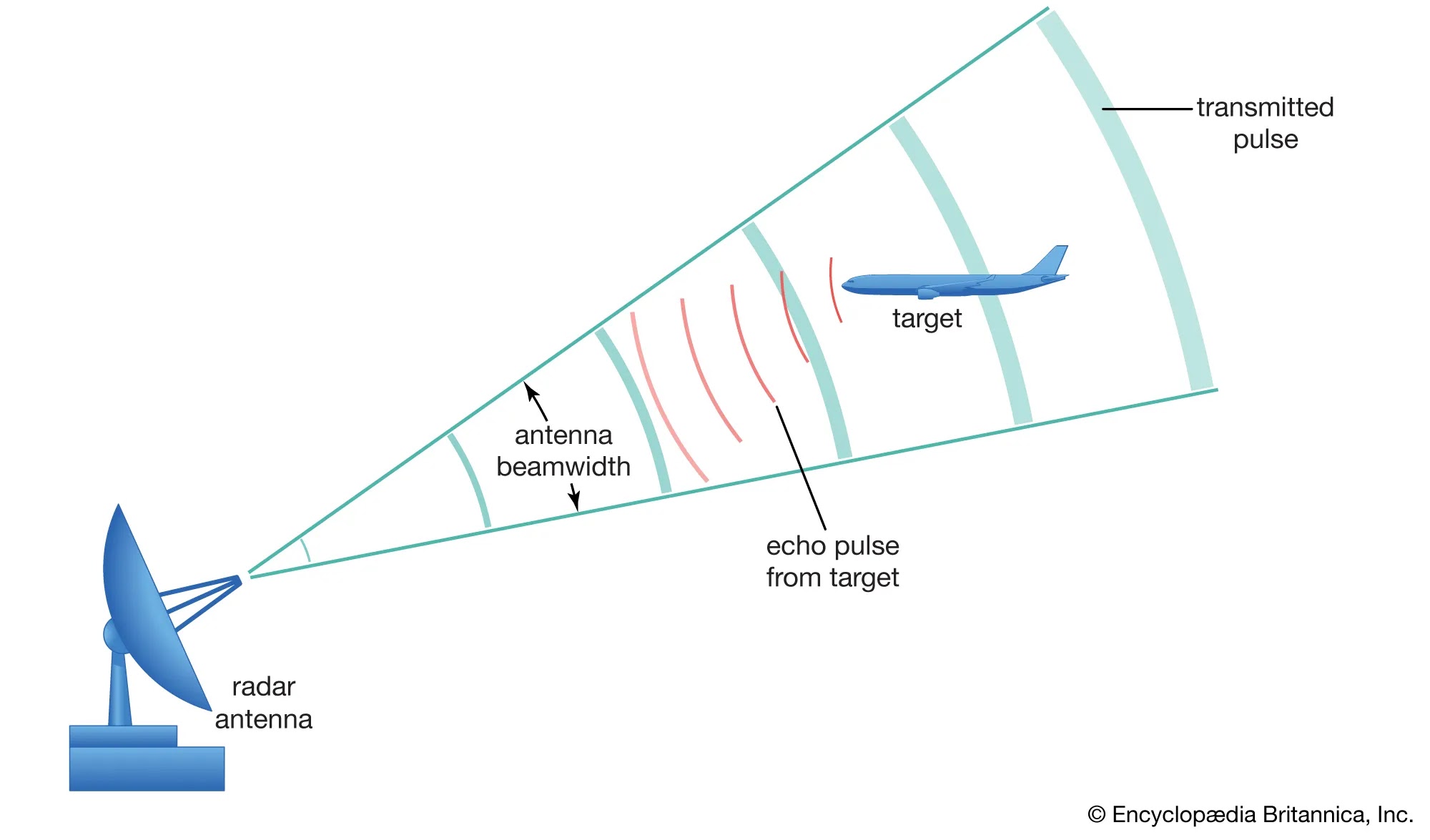
وتم خلال الحرب العالمية الثانية
تطوير أهم أجهزة الملاحة وهو الرادار (Radar) والذي يمكنه تحديد
المسافة بين موقع الرادار والأهداف الثابتة والمتحركة من خلال قيام مرسل
الرادار بإرسال موجة كهرومغناطيسية بترددات بالغة العلو نحو الهدف ومن ثم يقوم
مستقبل الرادار بالتقاط الموجات المنعكسة عن الهدف ومعالجة إشارتها لتحديد اتجاه
وبعد وسرعة الهدف. وتستخدم معظم أنواع الرادارات هوائيات عالية التوجيه تدور بمعدل
معين لتغطي الأهداف في جميع الاتجاهات وإظهار مواقعها على شاشات الرادار. ويستخدم الرادار في تطبيقات لا حصر لها حيث
ساعد
الرادار البشر على رؤية
الأجسام التي لا يمكنهم رؤيتها بأعينهم إما لبعدها عنهم أو نتيجة حجبها بالضباب
الكثيف أو الغيوم أو المطر أو الثلج أو الغبار أو لكونها مخفية تحت طبقات الأرض أو
في أعماق البحار. ويستخدم الرادار الآن للقيام بمهام لا حصر لها ففي التطبيقات
العسكرية يتم استخدامه كوسيلة للإنذار
المبكر من الطائرات الحربية المعادية وفي توجيه الدفاعات الجوية والصواريخ إلى
أهدافها وفي كشف مواقع المعدات الحربية المعادية
وكشف الألغام وفي التطبيقات المدنية يتم استخدامه في الملاحة الجوية لتوجيه
حركة الطائرات وتسهيل هبوطها في المطارات وفي الملاحة البحرية لتوجيه حركة السفن
وتجنيبها التصادم مع بعضها أو بمعدات الموانيء. ويستخدم الرادار في الأرصاد الجوية
لرسم صور لحركة الغيوم والرياح والأمطار والثلوج والمنخفضات والمرتفعات الجوية
والأعاصير والعواصف الرملية مما يساعد على الحصول على تنبؤات جوية دقيقة. وتستخدم
الرادارات المحمولة بالأقمار الصناعية والطائرات لدراسة سطح الأرض وما عليها واستخدام هذه المعلومات لمعرفة طبيعة
التضاريس الأرضية وطبوغرافيتها ونوع الغابات والنباتات والمحاصيل المزروعة والآفات الزراعية والظروف المناخية
والبيئية والبراكين والأعاصير والفياضانات والثروات المعدنية والمياه الجوفية
والبترول. وتستخدم الشرطة الرادارات لكشف السرعات الزائدة للمركبات على الطرق وذلك
للحد من الحوادث.
أنظمة ملاحة الأقمار
الصناعية العالمية
إن أحدث أنظمة الملاحة هي أنظمة ملاحة الأقمار
الصناعية العالمية (Global Navigation Satellite Systems (GNSS))) والتي ظهر أول أنواعها وهو نظام التموضع العالمي (Global Positioning System (GPS) التابع لوزارة الدفاع الأمريكية في بداية الربع الأخير من القرن العشرين. وفي هذه الأنظمة
يمكن للمستخدم تحديد إحداثيات موقعه واتجاه سيره وسرعته بالإضافة إلى الوقت الدقيق
وذلك لأي مكان على سطح الأرض وفي الفضاء المحيط بالأرض الذي يقع ضمن تغطية هذه
الأقمار. ويتم تحديد إحداثيات الموقع
في هذه الأنظمة من خلال جهاز استقبال
يستلم إشارات راديوية من مرسلات ثلاثة أقمار صناعية تحمل كل من هذه
الإشارات معلومات عن موقع القمر بالنسبة
لسطح الأرض وكذلك توقيت إرسال الإشارة بدقة عالية باستخدام ساعات ذرية عالية الدقة
تحملها هذه الأقمار. ويقوم جهاز الإستقبال بحساب المسافة بين موقعه وبين مواقع
الأقمار الثلاثة ومن ثم يتم تحديد الموقع عند نقطة تقاطع الدوائر الثلاثة التي تقع
الأقمار الصناعية الثلاث في مراكزها وذلك
باستخدام طريقة التثليث الخطي (Trilateration). وبسبب
أن أجهزة الاستقبال الأرضية لا تحمل ساعات دقيقة متزامنة مع الساعات الذرية
الموجودة على الأقمار الصناعية فمن غير الممكن لها قياس المسافات الفعلية بين
المستقبل والأقمار ولهذا يلزم استخدام قمر صناعي رابع لحساب فارق التوقيت
بينها ومن ثم حساب إحداثيات الموقع الثلاث
وهي خط الطول (Longitude) وخط العرض (Latitude) والارتفاع (Altitude). وتحتاج هذه الأنظمة لتغطية كامل سطح الأرض
إلى عدد محدد من الأقمار الصناعية يتم
توزيعها بانتظام على عدة مدارات دائرية مع العلم أن عدد الأقمار التي
يحتاجها النظام يتحدد من إرتفاع المدارات
عن سطح الأرض والذي يقل مع زيادة
الإرتفاع. ولقد تم اختيار مدارات بارتفاع يبلغ عشرين ألف كيلومتر تقريبا
لمعظم أنظمة ملاحة الأقمار الصناعية لسببين أولها أن الحد الأدنى لعدد الأقمار الذي تحتاجها هذه
الأنظمة يبلغ 24 قمرا صناعيا وهذا يضمن
وجود أربعة أقمار ضمن مجال الرؤيا المباشرة لجهاز الاستقبال. وأما السبب الآخر فهو أن القمر الصناعي يكمل
دورته في مثل هذا المدارات خلال نصف طول اليوم النجمي للأرض والبالغ 11 ساعة و 48
دقيقة أو خلال عدد صحيح من الأيام النجمية وهذا يضمن مسار ثابت للقمر فوق سطح الأرض أي أنه يمر فوق
نفس التضاريس الأرضية مرتين كل يوم . إن هذه الخاصية تساعد في تبسيط تخزين المعلومات
المتعلقة بمسار القمر وسهولة تتبعه من قبل محطات التحكم الأرضية ومن قبل أجهزة
الاستقبال لأنظمة تحديد الموقع.

وتعتبر الساعات الذرية (Atomic
clocks) هي
الأساس الذي يقوم عليه عمل أنظمة تحديد المواقع باستخدام الأقمار الصناعية ولهذا
يلزم توفر ساعة ذرية واحدة أو أكثر على متن هذه الأقمار تعمل على تحديد التوقيت الدقيق عند إرسال
مواقعها إلى الأجهزة الأرضية. وتستخدم الساعات الذرية الترددات الميكروية (microwave) أو الضوئية (optical) المنبعثة من الذرات المثارة لبعض العناصر
كمرجع زمني لظبط وقتها. فجميع ذرات العناصر
إذا ما تم إثارة إلكتروناتها من مدار منخفض الطاقة إلى مدار عالي الطاقة بالتسخين فإن هذه الإلكترونات
المثارة ستهبط بعد حين إلى وضعها الطبيعي مطلقة فرق الطاقة على شكل إشعاع
كهرومغناطيسي له تردد ثابت يعتمد على فرق الطاقة بين المدارين. ولقد وجد العلماء
أن عناصر معدودة يمكن أن تشع ترددات تقع ضمن نطاق الأمواج الدقيقة (microwave band) الذي يمتد من واحد جيقاهيرتز إلى ثلاثمائة جيقاهيرتز والذي يمكن قياسها بدقة عالية باستخدام الأجهزة
الإلكترونية المتاحة. ومن هذه العناصر السيزيوم (Caesium) بتردد 9,192,631,770 هيرتز
والروبيديوم (Rubidium) بتردد 6,834,682,610 هيرتز والهيدروجين (hydrogen) بتردد 1,420,405,751 هيرتز . لقد تم تصنيع أول ساعة ذرية دقيقة في عام 1955م
في مختبر الفيزياء الوطني في
بريطانيا بعد سلسلة من المحاولات
بدأت في عام 1949م في كل من الولايات الأمريكية المتحدة وبريطانيا. تعتمد دقة الساعات
الذرية على عوامل كثيرة منها دقة الأجهزة المستخدمة ودرجة الحرارة ونوع العنصر
المستخدم وغيرها ولقد بلغت دقة ساعات السيزيوم في الوقت الحالي إلى جزء من بليون
جزء من الثانية في اليوم أي أنها تتغير بمقدار ثانية واحدة في كل ثلاثة ملايين سنة
تقريبا. ونظرا لكبر حجم ساعات السيزيوم المعيارية
واستهلاكها العالي للطاقة تم استخدام ساعات ذرية أقل دقة ولكنها صغيرة الحجم
وقليلة الاستهلاك للطاقة مصممة للاستخدامات الفضائية كبعض أنواع ساعات السيزيوم والروبيديوم
والهيدروجين. وفي أنظمة ملاحة الأقمار الصناعية يتم معايرة
الساعات الذرية المحمولة على الأقمار
الصناعية من قبل الساعات الذرية الأرضية الأكثر دقة بشكل دوري من خلال محطات
التحكم الخاصة بهذه الأقمار.

نظام التموضع العالمي ( (GPS
إن أشهر أنظمة ملاحة الأقمار الصناعية هو نظام
التموضع العالمي ( (GPS
الأمريكي والذي بدأ تشغيله جزيئا للأغراض
العسكرية في عام 1978م وأصبح متاحا
للإستخدامات المدنية في عام 1994م في جميع أنحاء العالم. لقد كان للحرب
العالمية الثانية وكذلك سباق التسلح بين الولايات المتحدة الأمريكية والاتحاد
السوفيتي الدور الأكبر في تطوير نظام
التموضع العالمي. فقد أدى تطوير قدرات الصواريخ البالستية العابرة للقارات
من قبل الدولتين العظميين إلى إنتاج صواريخ جبارة قادرة على وضع أقمار صناعية في
مدارات حول الأرض وهو ما تم بالفعل في عام 1957م من قبل الاتحاد السوفيتي ومن ثم
الولايات المتحدة الأمريكية في عام 1958م.
أما الدافع المباشر لتطوير نظام التموضع العالمي فهو الحاجة الماسة للتحديد
الدقيق لمواقع الغواصات الحاملة للصواريخ البالستية الخاصة بالبحرية الأمريكية
وكذلك قاذفات القنابل الاستراتيجية الخاصة بالقوات الجوية الأمريكية عند إطلاق
الصواريخ والقنابل نحو أهدافها، شرعت البحرية الأمريكية ببناء أول نظام ملاحة
باستخدام الأقمار الصناعية في عام 1960م
وهو نظام ترانزت (Transit) أو نافسات (NAVSAT) والذي كان يتكون في البداية من خمسة أقمار تم زيادتها إلى 36 قمر مع نهاية 1968م وهذه الأقمار موضوعة في عدة
مدارات قطبية على ارتفاع 1100 كيلومتر فوق
سطح البحر. ويتم تحديد إحداثيات موقع الغواصات والسفن والطائرات الحربية من قمر
صناعي واحد فقط عند مروره وظهوره في سماء الموقع من خلال حسابات معقدة
تعتمد على ظاهرة إزاحة دوبلر (Doppler shift) الناتجة عن
الحركة النسبية بين مرسل القمر الصناعي ومستقبل جهاز تحديد الموقع. ومع إطلاق البحرية الأمريكية في عام 1967م لما يسمى بأقمار التوقيت (Timation satellites) التي تبث
الوقت بدقة عالية من ساعات ذرية والاستفادة من ذلك في حساب المسافات بين الأقمار
الصناعية والمستقبلات الأرضية بدأ التفكير من قبل مهندسي وزارة الدفاع الأمريكية
ببناء نظام ملاحة جديد باستخدام أقمار التوقيت.
بوشر العمل ببناء نظام التموضع العالمي
(GPS) في عام 1973م وتم تشغيله جزيئا للأغراض العسكرية في عام 1978م .

ويتكون نظام الجي بي أس في الوقت الحالي
من 24 قمر صناعي عامل وثمانية أقمار
احتياط موزعة على ستة مدارات دائرية تقع على
ارتفاع 20180 كيلومتر عن سطح البحر وبزاوية ميل لكل مدار تبلغ 55 درجة عن خط الإستواء. تم توزيع
الأقمار في المدارات بحيث يمكن أن يظهر ستة أقمار في مجال رؤية جهاز الاستقبال
الأرضي الذي يستلم الإشارات من أربعة أقمار منها لتحديد إحداثيات موقعه. وإلى جانب
القطاع الفضائي المكون من الأقمار الصناعية يحتاج النظام إلى قطاع للتحكم في
هذه الأقمار للحفاظ على مواقعها الدقيقة في مداراتها وسلامة أجهزتها وتوجيه
هوائياتها إلى الأرض حيث يتكون من محطة تحكم رئيسية ومحطة تحكم رئيسية بديلة
ومحطات رصد وهوائيات صحنية تتبع حركة الأقمار
الصناعية. أما القطاع الثالث فهو أجهزة الاستقبال الأرضية التي تحدد
المواقع لمئات الملايين من المستخدمين
المدنيين والعسكرين لمختلف الأغراض. ويستخدم النظام ترددين في نطاق (L-band) المخصص لتطبيقات تحديد الموقع حيث يبلغ تردد الموجة المستخدمة في التطبيقات
المدنية 1575,42 ميجاهيرتز بينما يبلغ للتطبيقات العسكرية لوزارة الدفاع
الأمريكية 1227,6 ميجاهيرتز.
فالتردد المخصص للتطبيقات المدنية غير مشفر ومتاح لجميع المستخدمين بينما تم تشفير
التردد المخصص للتطبيقات العسكرية الذي
يحمل معلومات أكثر دقة لتحديد المواقع. وتبث جميع أقمار النظام إشاراتها على نفس التردديين باستخدام
تقنية الوصول المتعدد ذي التقسيم التشفيري (Code
Division Multiple Access(CDMA)) حيث
يخصص لكل قمر شيفرة خاصة به تمكن المستقبلات الأرضية من التمييز والفصل بين الإشارات المرسلة من الأقمار على نفس التردد. ويقوم كل قمر صناعي في النظام ببث رسالة رقمية
بشكل دوري كل اثنتي عشر دقيقة ونصف تحتوي
على رقم المدار ورقم القمر وإحداثيات القمر الثلاث والوقت الذي تم فيه إرسال
الرسالة بدقة عالية بالاعتماد على الساعات الذرية عالية الدقة الموجودة في هذه
الأقمار. يقوم جهاز الإستقبال الأرضي
باستلام جميع إشارات الأقمار الصناعية التي تقع في سمائه وضمن نطاق رؤيته باستخدام
نفس الهوائي ويتم الفصل بينها من خلال مطابقة الشيفرات الفريدة المخصصة لهذه
الأقمار مع الشيفرات المخزنة فيه لجميع أقمار النظام. ومن ثم يقوم جهاز الاستقبال
باستخلاص المعلومات المرسلة من أقرب أربعة أقمار
إليه وهي إحداثيات الأقمار وفرق زمن التأخير بين ساعات الأقمار وساعة جهاز
الإستقبال. وأخيرا يقوم جهاز الإستقبال
بحساب المسافة بين موقعه وبين مواقع الأقمار
ومن ثم يتم تحديد موقع الجهاز عند نقطة تقاطع الدوائر التي تقع الأقمار
الصناعية في مراكزها وذلك باستخدام طريقة التثليث الخطي (Trilateration).
.png)

تعتمد دقة تحديد إحداثيات الموقع في نظام الجي
بي أس على عوامل كثيرة منها تلك المتعلقة
بالأقمار الصناعية كدقة الوقت الذي ترسله هذه الأقمار والمستمد من الساعات الذرية ودقة
أحداثيات مواقع الأقمار التي تقيسها أجهزتها وكذلك معدل إرسال هذه المعلومات إلى
الأرض. أما العوامل المتعلقة بأجهزة الاستقبال فهي عدد الأقمار التي تصل إشاراتها إلى الجهاز عند لحظة القياس فكلما زاد العدد عن الحد الأدنى وهو ثلاثة
أقمار كلما زادت دقة تحديد الموقع وتزداد الدقة كذلك كلما تباعدت الأقمار
المرئية من الجهاز عن بعضها. وتعمل
طبقات الغلاف الجوي وخاصة طبقة الأينوسفير على تقليل دقة القياس بسبب ظواهر
إنكسار وانعكاس وحيود الموجات الكهرومغناطيسية التي تتعرض لها من هذه الطبقات مما
ينتج عن ذلك خطأ في قياس المسافات بين الجهاز والأقمار الصناعية. وتقل دقة القياس
في الظروف الجوية السيئة. ومن العوامل الرئيسية التي تعمل على تقليل دقة تحديد الموقع هو عدم وصول بعض
إشارات الأقمار إلى جهاز الاستقبال بسبب وجوده في داخل المباني والأنفاق والكهوف
وما بين المباني العالية والغابات والأودية وداخل المركبات والقطارات وغيرها من
الهياكل المعدنية. وتلعب مواصفات جهاز
الاستقبال دورا بالغ الأهمية في دقة تحديد
الموقع ككفاءة الطرق الرياضية المستخدمة في حساب إحداثيات الموقع من البيانات التي
يستلمها من الأقمار الصناعية ودقة الساعات المستخدمة فيه وقدرته على التبؤ
بإحداثيات الموقع من الحسابات السابقة ومقارنتها بالحسابات الحالية وكذلك
الاستفادة من مصادر أخرى لتحديد المواقع.
تبلغ دقة تحديد الموقع في أجهزة الهواتف المتحركة الذكية بين متر وخمسة
أمتار وفي الأجهزة المخصصة لتحديد الموقع عشرات السنتيمترات وفي أجهزة المساحة عدة
سنتيمرات. وقد تصل الدقة إلى المليمتر في
الأنظمة العسكرية حيث يتم استخدام ساعات عالية الدقة وكذلك الاستفادة من المعلومات
المحملة على الترددين الاثنين المستخدمين في النظام وهما تردد الاستخدمات المدنية
غير المشفر وتردد الاستخدامات العسكرية المشفر.

وإلى جانب نظام التموضع العالمي (GPS)
الخاص بالولايات المتحدة يوجد عدة أنظمة ملاحة باستخدام الأقمار الصناعية أهمها نظام
جلوناس الروسي (GLONASS) الذي بدأ العمل
بإنشائه في عام 1982م وتم تشغيله في عام
1995م ولكن ساءت خدمة النظام لمدة 15 سنة بسبب تعطل بعض الأقمار إلى ان تم تصحيح
الوضع في عام 2011م. ويتكون نظام جلوناس من 24 قمرا صناعيا موزعة بالتساوي على
ثلاث مدارات دائرية مائلة على ارتفاع
19130 كيلومتر ويكمل دورته في 11 ساعة و 16 دقيقة بحيث يكمل 17 دورة حول الأرض كل ثمانية أيام نجمية وهذا يمكنه من
المرور فوق مسار محدد كل ثمانية أيام مقابل يومين في النظام الأمريكي. وتتراوح دقة تحديد الموقع في النظام الروسي بين
ثلاثة أمتار وسبعة أمتار وهذا أقل من دقة
النظام الأمريكي. أما النظام الثالث فهو نظام جاليليو (Galileo) التابع للاتحاد
الأوروبي والذي بدأ العمل على
إنشائه في عام 2011م وتم تشغيله جزئيا في عام 2016م وبشكل كامل في عام 2022م.
ويتكون نظام جاليليو كما في النظامين السابقين من 24 قمرا صناعيا موزعة بالتساوي
على ثلاث مدارات دائرية مائلة على ارتفاع 23222
كيلومتر ويكمل دورته في 14 ساعة و 5 دقائق بحيث يكمل 17 دورة حول الأرض كل عشرة أيام نجمية وهذا يمكنه من المرور فوق مسار محدد
كل عشرة أيام. وتصل دقة تحديد الموقع في النظام الأوروبي إلى 20 سنتيمتر وهو أكثر دقة من النظام الأمريكي للأغراض المدنية . أما النظام الرابع فهو نظام بايدو (BeiDou) للملاحة بالأقمار الصناعية الخاص بالصين والذي بدأ العمل بالجيل
الأول منه في عام 2000م بثلاثة أقمار في مدار أرضي متزامن تقدم الخدمة للصين فقط ومن ثم الجيل الثاني
المكون من عشرة أقمار وأخيرا تم في عام 2020م تشغيل الجيل الثالث لتقديم خدمة
عالمية بدقة تصل إلى مترين ونصف للخدمات
المدنية و عشرة سنتيمترات للخدمات
العسكرية. ويتكون نظام بايدو الحالي من 44 قمرا صناعيا سبعة منها في المدار المتزامن
على ارتفاع 36 ألف كيلومتر وعشرة في مدارات
متزامنة مائلة و 27 قمر في مدارات أرضية متوسطة على ارتفاع 21500
كيلومتر وتكمل دوراتها في 12 ساعة و 53
دقيقة بحيث يكمل 13 دورة حول الأرض كل سبعة أيام نجمية.
أما النظام الخامس فهو النظام الهندي (IRNSS) وهو نظام إقليمي للملاحة
بالأقمار الصناعية يغطي المنطقة الهندية
وبعض الدول المجاورة ويتكون من خمسة أقمار
في مدارات أرضية متزامنة على ارتفاع 36 ألف كيلومتر تم اطلاق أولها في عام 2013م
وآخرها في عام 2023م.
