
أنظمة
الرادار
الدكتور
منصور أبوشريعة العبادي \ جامعة العلوم والتكنولوجيا الأردنية

8-1 مقدمة
وإذا كانت أنظمة
الاتصالات قد ساعدت البشر للتحدث مع بعضهم وكذلك رؤية بعضهم رغم المسافات التي
تفصل بينهم فإن الرادار قد ساعد البشر على
رؤية الأجسام التي لا يمكنهم رؤيتها بأعينهم إما
لبعدها عنهم أو نتيجة حجبها بالضباب الكثيف أو الغيوم أو المطر أو الثلج أو الغبار
أو لكونها مخفية تحت طبقات الأرض أو في أعماق البحار. ويستخدم الرادار الآن للقيام
بمهام لا حصر لها ففي التطبيقات العسكرية يتم استخدامه كوسيلة للإنذار المبكر من الطائرات الحربية
المعادية وفي توجيه الدفاعات الجوية والصواريخ إلى أهدافها وفي كشف مواقع المعدات
الحربية المعادية وكشف الألغام وفي
التطبيقات المدنية يتم استخدامه في الملاحة الجوية لتوجيه حركة الطائرات وتسهيل
هبوطها في المطارات وفي الملاحة البحرية لتوجيه حركة السفن وتجنيبها التصادم مع بعضها
أو بمعدات الموانيء. ويستخدم الرادار في الأرصاد الجوية لرسم صور لحركة الغيوم
والرياح والأمطار والثلوج والمنخفضات والمرتفعات الجوية والأعاصير والعواصف
الرملية مما يساعد على الحصول على تنبؤات جوية دقيقة. وتستخدم الرادارات المحمولة
بالأقمار الصناعية والطائرات لدراسة سطح الأرض وما عليها واستخدام هذه المعلومات لمعرفة طبيعة
التضاريس الأرضية وطبوغرافيتها ونوع الغابات والنباتات والمحاصيل المزروعة والآفات الزراعية والظروف المناخية
والبيئية والبراكين والأعاصير والفياضانات والثروات المعدنية والمياه الجوفية
والبترول. وتستخدم الشرطة الرادارات لكشف السرعات الزائدة للمركبات على الطرق وذلك
للحد من الحوادث.
8-2 تاريخ الرادار
ظهرت فكرة استخدام الموجات الكهرومغناطيسية لكشف الأهداف مع
اكتشاف الأمواج الكهرومغناطيسية في عام 1887م على يد الفيزيائي الألماني هنيرتش هيرتز
(Heinrich Hertz) والذي اكتشف أيضا أن هذه الأمواج تنعكس عند اصطدامها
بالأجسام المعدنية والعازلة. وفي عام 1903م تمكن المهندس الألماني كريستيان هولسماير (Christian Hulsmeyer) من إجراء تجربه
تمكن من خلالها كشف وجود سفينة
من خلال الضباب ولكن دون تحديد المسافة. وفي عام 1921م تمكن ألبرت هول (Albert Hull) من اختراع أول أشكال الصمام الإلكتروني المسمى بالمجنيترون (Magnetron)
وهو مذبذب قادر على توليد ترددات عالية جدا وبقدرات عالية. وفي عام 1922م ظهر
أول نظام لرادار طويل المدى نسبيا على يـــدي العـــالم الايطالي المشهور ماركوني (Marconi). وفي عام 1930م تمكن المهندس الأمريكي هايلاند (Lawrence A. Hyland) وهو في مختبر البحرية الأمريكية من كشف أول
طائرة باستخدام ما يسمى نظام كشف الأهداف بالراديو (الأمواج الكهرومغناطيسية) وكان
التردد المستخدم ثلاثة وثلاثين ميجاهيرتز. وفي عام 1934م تمكنت البحرية الأمريكية
من تصميم أول رادار نبضي لكشف وجود الطائرات دون تحديد بعدها وكان يعمل على تردد
ستين ميجاهيرتز وقد وصل مداه لأربعين كيلومتر. وفي 1935 حصل العالم الإنكليزي واتسون واط (Watson-Watt)
على براءة اختراع لرادار يستطيع أن يحدد المسافة. وفي عام 1936م تم اختراع صمام إلكتروني آخر وهو الكلايسترون
(Klystron) والذي يستخدم
لتوليد وتضخيم الإشارات في نطاق الأمواج الدقيقة وقد لعب مع الميجنيترون دورا كبيرا
في تطوير أنظمة الرادار الحديثة. وفي عام 1937م تم تركيب أول رادار على ظهر
المدمرة الأمريكية "ليري" وظهرت كذلك الرادارات التي تتحكم في المدافع
المضادة للطائرات الحربية ورادارات الإنذار المبكر بعيدة المدى. وفي عام
1939م تم اختراع المجنيترون ذي الفجوة (cavity magnetron) على يد المهندسين البريطانيين جون راندال وهاري بوت (John Randall & Harry Boot) وهذا المولد وعلى
العكس من المجنيترون العادي قادر على
توليد ترددات في منطقة الميكروويف وقادر كذلك على إنتاج قدرات كبيرة جدا تصل لمئات
الكيلوطات. لقد كان هذا الاختراع الأساس التي قامت عليه أنظمة الرادار الحديث حيث
تتطلب الرادارات ترددات وقدرات بث عالية جدا
فالترددات العالية تلزم لتصغير حجم الهوائيات وكذلك لتقليل عرض أشعة
الرادار لزيادة دقة تحديد موقع الهدف أما قدرات البث العالية فتلزم لزيادة المدى
الذي يمكن للرادار أن يكشف ضمنه الأهداف. ولقد تم خلال الحرب العالمية الثانية
(1939-1945م) تطوير الرادارات بشكل كبير جدا بسبب الحاجة الماسة لها وقد تمكن
الأمريكان من تصنيع رادار يعمل على تردد ثلاثة جيقاهيرتز باستخدام المجنيترون
بينما كانت جميع الرادارات الألمانية تعمل على ترددات دون واحد جيقاهيرتز مما ساعد
في انتصار الحلفاء على ألمانيا. وفي عام 1946م تم استخدام الرادار لقياس بعد القمر
عن الأرض. وخلال السنوات التي تلت الحرب بدأ
باستخدام الرادارات في التطبيقات المدنية المختلفة كمراقبة الملاحة الجوية والبحرية وفي الأرصاد الجوية وفي استكشاف الفضاء ودراسة التضاريس الأرضية. وفي
عام 1954م تم إنتاج أول رادار يعمل بنظام دوبلر حيث يمكنه تحديد سرعة الأهداف
المتحركة. ومع ظهور الحواسيب والمتحكمات الدقيقة ومعالجات
الإشارات الرقمية طرأت تحسينات كثيرة على أنظمة الرادار من حيث التحكم بالرادار
لغرض متابعة الأهداف ومن حيث القدرة على استخلاص معلومات كثيرة من الإشارات
المرتدة عن الأهداف.
8-3 مبدأ عمل الرادار
إن المبدأ الأساسي
الذي يقوم عليه عمل جميع أنواع الرادارات هو في أن الموجات الكهرومغناطيسية تنعكس (reflected) أو تتبعثر (scattered) عند انتقالها من وسط إلى وسط آخر
يختلفان في بعض خصائصهما الكهربائية والمغناطيسية والتي عادة ما تتحدد بثوابت ثلاث
وهي العزل الكهربائي (permittivity) والموصلية (conductivity) والنفاذية المغناطيسية (permeability). وبما أن الموجات الكهرومغناطيسية المنطلقة من هوائيات الرادارات تنتشر في الهواء
فإنها بالتالي ستنعكس بدرجات متفاوتة عن جميع الأجسام التي تعترض طريقها وذلك لأن
خصائصها الكهربائية والمغناطيسية تختلف عن تلك التي للهواء والتي هي أقرب ما تكون
لخصائص الفراغ. وإذا ما تمكن الرادار باستخدام هوائيات الاستقبال من التقاط الموجات
المنعكسة عن هذه الأجسام أو ما نسميها الأهداف فإنه يقوم بمعالجتها ليستخلص
معلومات بالغة الأهمية عن هذه الأهداف. فالمعلومات المستخلصة في حالة الرادار
المثالي هي أولا التأكد من وجود أو عدم وجود الهدف وثانيا تحديد مكان الهدف في
الفضاء المحيط بالرادار والذي يعطى بأبعاد
ثلاثة وهي الزاوية الأفقية (azimuth angle)
والزاوية الرأسية (elevation
angle) والبعد (distance) عن الرادار وثالثا تحديد اتجاه سير (direction) وسرعة (speed) الهدف إذا كان متحركا ورابعا طبيعة ونوع
الهدف. إن شدة الموجة المنعكسة عن الأجسام تعتمد على عوامل كثيرة أولها طبيعة
المادة التي يتكون منها سطح الجسم فالمعادن بمختلف أنواعها لها معامل انعكاس قد
يصل إلى الواحد وذلك لارتفاع موصليتها ولذلك فإنه من السهل على الرادار كشف الطائرات
والسفن والمركبات لأن أجسامها مصنوعة من المعادن كالحديد
والألمنيوم. أما شدة الموجة المنعكسة عن المواد العازلة فإنه يعتمد على معاملات
انكسارها (refractive index ) فكلما زاد معامل الانكسار كلما
زادت درجة الانعكاس ولكنه لا يصل إلى مستوى المواد المعدنية. وهنالك من المواد المصنعة ما يمكنها امتصاص أشعة الرادار ولا يعكسها كبعض
المواد المعدنية ذات المقاومة الكهربائية العالية وبعض المواد المغناطيسية وبعض الأصباغ الداكنة ولهذا فإنه من الصعب على الرادار أن يكشفها وتستخدم
مثل هذه المواد لطلي أسطح أجسام الطائرات والصواريخ الحربية والعربات العسكرية.
أما العامل الثاني فهو شكل سطح جسم الهدف فالأسطح المستوية والمنتظمة تعكس الموجات
أكثر من الأسطح غير المستوية أو المتعرجة ولكن الأسطح المستوية ذات فائدة للرادار
فقط إذا كانت متعامدة على اتجاه الموجة القادمة من الرادار أما إذا كانت مائلة ولو
بزاوية صغيرة عن الاتجاه العمودي فإن الموجة المنعكسة لن تصل إلى الرادار أبدا
وبالتالي لن يتمكن من اكتشاف الهدف . ولقد استقاد صانعي الطائرات الحربية من هذه
الخاصية في تصنيع طائرات يصعب على الرادار كشفها وذلك من خلال تصنيع السطح الخارجي
من عدد كبير من الأسطح المستوية الصغيرة تميل عن بعضها البعض بزوايا صغيرة كما في
الطائرة الحربية الأمريكية المسماة بالشبح. أما العامل الثالث فهو طول الموجة التي
يعمل عليها الرادار فإذا كان طول الموجة أكبر من أبعاد جسم الهدف فإن الموجة لن
تنعكس عن الهدف بل ستحيد عنه وتكمل مسارها في نفس الاتجاه وذلك بسبب ظاهرة الحيود
( Diffraction) المعروفة. ولهذا السبب فإن معظم
أنواع الرادارات تستخدم موجات بالغة القصر أي عالية التردد تقع في نطاق الأمواج
الدقيقة (Microwaves) الذي يمتد من واحد جيقاهيرتز إلى
مائة جيقاهيرتز.

يعمل الرادار من
خلال قيام جهاز الإرسال بإطلاق موجة كهرومغناطيسية من خلال الهوائي بتردد محدد باتجاه ما في الفضاء ثم يقوم جهاز
الاستقبال بالتنصت على الموجات القادمة من ذلك الاتجاه فقط فإن استقبل موجة بنفس التردد
أو قريبا منه فإن هذا يعني وجود جسم ما قد اعترض مسار الموجة المرسلة في ذلك
الاتجاه وقام بعكسها باتجاه الرادار. إن الدقة في تحديد اتجاه الهدف يعتمد اعتمادا
كبيرا على عرض الشعاع المنبعث من الرادار فكلما قل عرض الشعاع كلما زادت دقة تحديد
الاتجاه ولهذا السبب فإن الرادارات تستخدم هوائيات عالية التوجيه (high directivity) للحصول على أشعة ذات عرض ضيق جدا أقرب ما تكون لشعاع
الليزر. ولكي يتمكن الرادار من كشف الأهداف في جميع الاتجاهات فإن عليه القيام بمسح
(scan) جميع الفضاء المحيط بالرادار بشعاع
ضيق جدا وهذه مهمة ليست بالسهلة حيث يتطلب من الرادار تحريك الهوائي في جميع الاتجاهات ضمن فترة زمنية محددة ثم يقوم بتكرار
هذه العملية بشكل دوري ومتواصل. ويتم تحديد الزاوية الأفقية والزاوية الرأسية لاتجاه
الهدف من اتجاه الهوائي في اللحظة التي يتم بها إرسال أو استلام الموجة المنعكسة
علما بأن الفترة الزمنية فيما بين إرسال الموجة واستقبالها لا يتجاوز الملي ثانية
بسبب أن الموجات تنتشر بسرعة الضوء. أما بعد الهدف عن الرادار وكذلك سرعته فإنه
يتم تحديدهما بطرق مختلفة وذلك حسب نوع الرادار والذي سنشرحها بعد قليل. إن مثل
هذا الرادار الذي يحدد موقع الهدف بأبعاده الثلاثة وهي الزاوية الأفقية والزاوية
الرأسية والبعد يسمى رادار ثلاثي الأبعاد (3D radar) وهو كما ذكرنا سابقا ليس من السهل
تنفيذه. ولهذا السبب فإن معظم الرادارات العملية هي رادارات ثنائية الأبعاد (2D
radar) تحدد البعد والزاوية الأفقية ولا
تحدد الزاوية الرأسية و يلزم في هذا الحال أن يكون عرض الشعاع في الاتجاه الرأسي
واسعا بينما يكون ضيقا جدا في الاتجاه
الأفقي لكي يزيد من دقة تحديد الاتجاه الأفقي. وفي الرادارات ثنائية البعد يتم
تدوير الهوائي ميكانيكيا حول المحور الرأسي لكي يغطي جميع الزوايا الأفقية التي
تمتد من صفر إلى 360 درجة ويجب أن لا تزيد
سرعة دوران الهوائي عن سرعة معينة وذلك لكي يتمكن من التقاط الموجات المرتدة من
الأهداف البعيدة وتعتمد سرعة تدوير الهوائي على نوع الاستخدام حيث تتراوح بين عدة
دورات في الدقيقة لرادارات الطقس وعدة عشرات في التطبيقات العسكرية.
معادلة الرادار (Radar Equation)
تستخدم معادلة
الرادار لتصميم مختلف أنواع الرادارات للتطبيقات المختلفة فمن هذه المعادلة يمكن
حساب أقصى بعد يمكن أن يغطيه الرادار أو قدرة البث اللازمة لتغطية منطقة مراقبة
معينة. وتتحدد قدرة الإشارة
المرتدة إلى الرادار من المعادلة المشهورة التالية:

حيث أن Pt هي قدرة الإشارة المرسلة من الرادار
و Gt هو كسب هوائي الإرسال و Ar هي المساحة الفعلية لهوائي الاستقبال و σ هو مساحة المقطع العرضي الفعلي للهدف كما يراه الرادار و F هو عامل الانتشار الذي يأخذ في الاعتبار طبيعة التضاريس
والجو الذي يعمل فيه الرادار وأخيرا R هي المسافة بين الرادار والهدف. ومن الواضح من هذه
المعادلة أن قدرة الإشارة المرتدة تتناسب عكسيا مع المسافة مرفوعة للأس أربعة
بينما تتناسب هذه القدرة في أنظمة الاتصالات عكسيا مع مربع المسافة مما يعني صعوبة
بالغة في تصميم أنظمة الرادار وعلى الأخص بعيدة المدى. فعلى سبيل المثال فإن قدرة
البث اللازمة لرادار يغطي مائة كيلومتر تزيد بعشرة ملايين مرة عن تلك التي لنظام
الاتصالات إذا ما افترضنا نفس الحساسية للمستقبل ونفس الكسب لهوائي الإرسال
والاستقبال. ويمكن تقليل قدرة البث المفرطة العلو في أنظمة الرادار بعيدة المدى من
خلال استخدام طرق مختلفة أهمها استخدام هوائيات كبيرة الحجم حيث أن قدرة الإشارة
المستلمة تتناسب طرديا مع أبعاد هوائي الإرسال والاستقبال أو استخدام ترددات عالية جدا حيث أن كسب الهوائي يتناسب
طرديا مع مربع التردد المستخدم ولذلك نجد أن معظم الرادارات تستخدم ترددات تقع في
نطاق الموجات الدقيقة والملليمترية أي الترددات من واحد إلى مائة جيقاهيرتز. ولكن من عيوب الترددات التي تقع في هذا النطاق
أن الغيوم والأمطار والرمال تمتص جزء كبير من طاقتها ويزداد الامتصاص كلما زاد
التردد ولذلك فإن بعض التطبيقات تلزم استخدام ترددات أقل من واحد جيقاهيرتز كما في
الرادارات المستخدمة في الطائرات والسفن. ومن الواضح أيضا من المعادلة أنه كلما
زادت مساحة مقطع الهدف كلما زادت قدرة الإشارة المستقبلة وكلما سهل اكتشافه من قبل
الرادار وليس من الضروري أن يتناسب المقطع الفعلي مع حجم الهدف الحقيقي حيث أن شكل
سطح الهدف ونوع مادة سطحه مع عوامل أخرى هي التي تحدد مساحة المقطع الفعلي ولهذا
فإنه بالإمكان تصنيع طائرات كبيرة الحجم ولكن بمقاطع فعلية صغيرة جدا بحيث يصعب على الرادار
اكتشافها. إن الذي يحدد قدرة الرادار على اكتشاف الأهداف هو قيمة قدرة الإشارة
المستقبلة بالمقارنة مع قدرة الإشارات غير المرغوب فيها التي تدخل معها إلى
المستقبل والتي من أهمها الضجيج (noise) الذي تولده العناصر الإلكترونية في المستقبل وكذلك الركام (clutter) وهو عبارة عن الموجات التي ترتد عن الأجسام الثابتة
المحيطة بالهدف كالجبال والغيوم وما شابه ذلك
8-4 أنواع الرادار
الرادار النبضي (Pulsed Radar)

ولكي يتمكن الرادار من تحديد بعد الهدف بدون أي التباس (ambiguity) يجب أن تصل النبضة المرتدة قبل إطلاق النبضة التالية وإلا فإن وصولها بعدها سيجعل الأمر ملتبسا على المستقبل لا يدري إن كانت النبضة المرتدة ناتجة عن النبضة المرسلة حديثا أم عن النبضات التي سبقتها. وعلى هذا فإن الرادار المصمم لقياس مدى قد يصل إلى مائة كيلومتر وبدون أي التباس يجب أن لا يزيد معدل النبضات المرسلة عن ألف وخمسمائة نبضة في الثانية. أما أقل بعد يمكن أن يقيسه الرادار فيتحدد من عرض النبضة المرسلة فالرادار النبضي لا يمكنه قياس النبضات التي ترتد في زمن يقل عن عرض النبضة. ولقياس بعد الأهداف القريبة يجب أن يقل عرض النبضة عن قيمة محددة يتم احتسابها من قيمة أقل بعد فعلى سبيل المثال فإن عرض النبضة يجب أن لا يزيد عن سبعة أجزاء من مليون جزء من الثانية. إن تقليل عرض النبضة سيؤدي إلى تقليل كمية الطاقة التي تحتويها وبالتالي سيؤدي إلى تقليل البعد الأقصى للهدف الذي يمكن للرادار أن يكتشفه ولذلك فإنه من الصعب استخدام الرادار النبضي في نفس الوقت لقياس بعد الأهداف البعيدة والقريبة ولذلك يوجد رادارات نبضية بعيدة المدى لا يمكنها قياس بعد الأهداف القريبة وكذلك العكس.
رادار دوبلر (Doppler Radar)
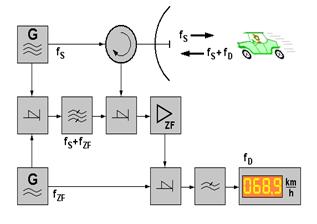
الرادار ذو الموجة المستمرة (Continuous Wave radar)

يعمل الرادار ذو
الموجة المستمرة من خلال إرسال موجة
كهرومغناطيسية جيبية عالية التردد بشكل مستمر وليس على شكل نبضات كما في الرادار
النبضي. ويوجد نوعان من هذا الرادار ففي النوع الأول يكون تردد الموجة المرسلة ثابتا ولا يمكن في مثل
هذا الحال قياس بعد الهدف سواء أكان متحركا أم ثابتا ولكن يمكن استخدام هذا
الرادار لقياس سرعة الأهداف المتحركة باستخدام تأثير دوبلر. ويستخدم هذا النوع في
التطبيقات التي تهتم بسرعة الهدف فقط كما في الرادارات المستخدمة من قبل
الشرطة لقياس سرعات المركبات على الطرق
ولكي يتمكن الشرطي من قياس السرعة بشكل دقيق عليه أن يوجه الرادار بنفس اتجاه سير
المركبة ,وإلا ستكون السرعة المقاسة أقل من السرعة الحقيقية. ولقياس بعد الهدف باستخدام الرادار ذي الموجة المستمرة يتم تعديل تردد الموجة الجيبية بإشارة ذات تردد منخفض لها شكل سن المنشار (Sawtooth
wave)
بحيث يزداد تردد الموجة الجيبية خطيا من قيمة دنيا عند بداية الدورة إلى قيمة عليا
عند نهايتها ويسمى هذا النوع رادار الموجة المتصلة بتعديل التردد (frequency-modulated
continuous wave radar).
وعندما يقوم المستقبل بمقارنة تردد الموجة
المرتدة مع تردد الموجة المرسلة عند لحظة زمنية معينة نجد أن هنالك فرقا بينهما
نتيجة للتأخير الزمن في الموجة المرتدة ومن السهل إثبات أن بعد الهدف عن الرادار
يتناسب مع الفرق في التردد. ويستخدم هذا النوع من الرادار لقياس بعد الأهداف
الثابتة حيث أن الأهداف المتحركة تعمل أيضا على تغيير التردد مما يجعل الأمر
ملتبسا على المستقبل فلا يستطيع التمييز فيما إذا كانت الإزاحة في التردد ناتجة عن
التأخير الزمني أو عن تأثير دوبلر. ومن الواضح أيضا أن هذا النوع من الرادارات لا يمكنه
قياس سرعة الهدف وذلك لنفس السبب. ولذلك
فإن رادار الموجة المتصلة بتعديل التردد يستخدم بكثرة في الطائرات لقياس ارتفاعها عن الأرض والذي
يسمى راديو مقياس الارتفاع (radio altimeters).
رادار المصفوفة الطورية (Phased Array Radar)

الرادار ذو الفوهة المصطنعة (Synthetic
Aperture Radar (SAR))


تتطلب بعض التطبيقات أن يقوم الرادار بتتبع
الهدف المتحرك بعد أن يتم اكتشافه من قبل نفس الرادار أو رادار آخر حيث يتوقف
هوائي الرادار عن الدوران ويتم توجيهه نحو الهدف تماما ويتابع حركته باستمرار.
وغالبا ما يتم استخدام نظام تحكم بتغذية راجعة سلبية تتحكم بحركة الهوائي لكي
يتمكن من متابعة الهدف بشكل دقيق. وأكثر ما تستخدم مثل هذه الأنظمة في التطبيقات
العسكرية حيث يتم ربط نظام التتبع بنظام التحكم بمصادر النيران بحيث يتم توجيهها
نحو أهدافها بطريقة آلية وما على الجندي إلا الضغط على الزناد لإطلاق النار في
الوقت المناسب أو يتم ذلك بشكل تلقائي. وتستخدم هذه الأنظمة في أنظمة الدفاع الجوي
والصواريخ قصيرة المدى وفي الأنظمة المضادة للصواريخ وغيرها. وتستخدم كذلك في
أنظمة هبوط الطائرات. إن أحد عيوب هذا النظام أن عملية المسح للأهداف الأخرى توقف بمجرد
اكتشاف الرادار لأحد الأهداف والقيام بتتبعه وتحل هذه المشكلة إما بوجود رادارات
أخرى أو باستخدام نظام التتبع مع البحث (track-while-scan
(TWS))
ولكن يلزم في هذه الحالة وجود حاسوب يقوم بتخزين معلومات عن عدد من الأهداف
المتتبعة ويمكنه إرسال إشارات لأنظمة التحكم بالنيران لتوجيهها نحو هذه أهداف.
ويمكن أن تحل هذه المشكلة أيضا باستخدام رادارات بهوائيات المصفوفة الطورية (phased
array antenna). وتتميز هذه الأنواع من الرادارات بأن عملية المسح
تتم بطريقة إلكترونية (electronic scanning)
حيث لا يلزم تحريك الهوائي كما في الرادارات العادية. وتتميز كذلك بإمكانية برمجة
الهوائي ليشكل أكثر من شعاع يستخدم بعضها للمسح وبعضها لمتابعة الأهداف.
8-5 مكونات الرادار (Radar Components)


يتكون الرادار بشكل عام من عدة أقسام رئيسية وهي المرسل والمستقبل
والهوائيات ومفتاح الإرسال والاستقبال وشاشة العرض ومعالجات الإشارة والمؤقت أو
المزامن (synchronizer). ويتكون المرسل من مذبذب يقوم بتوليد إشارة
كهربائية جيبية ذات قدرة منخفضة وبتردد ثابت أو متغير تحدد قيمته حسب نوع الرادار
ومن معدل يقوم بتحديد شكل الموجة التي
يرسلها الرادار والتي تكون في الغالب على شكل نبضات متتالية بعرض لا يتجاوز عدة
ميكروات من الثانية ومن مضخم يقوم بتكبير الإشارة
الكهربائية ذات القدرة المنخفضة التي يولدها المذبذب لينتج إشارة عالية القدرة قد تصل
إلى الميجاواط . ويتكون المستقبِل من مضخم عالي الحساسية (high
sensitive amplifier) يقوم بتكبير الإشارة الضعيفة جدا المرتدة من الهدف والتي قام الهوائي بالتقاطها والتي لا تتجاوز قدرتها جزء من بليون جزء من
الواط ومن عدد كبير من المرشحات لتقليل أثر إشارات الضجيج والتداخلات على الإشارة
المرتدة ومن معالج الإشارات الذي يقوم بحجب
إشارات الصدى(echo signals) المرتدة عن الأهداف الكبيرة والثابتة ومن ثم حساب بعد
الهدف وسرعته وإظهار الهدف على شاشة العرض. أما هوائي الرادار فيتكون النوع الأكثر
شيوعا من هوائي بوقي (horn antenna) مثبت في مقدمة هوائي
صحني عاكس حيث يشع البوق الموجات الكهرومغناطيسية
باتجاه العاكس الذي يقوم بدوره بتركيزها وبثها على شكل شعاع يتم تحديد شكله تبعا
لنوع الرادار. وبما أن معظم الرادارات تتطلب أن يكون عرض الشعاع (beamwidth)
في المستوى الأفقي ضيق جدا لزيادة دقة
تحديد الهدف بينما يكون عرض الشعاع في المستوى الرأسي كبير نسبيا فإن الهوائي العاكس المستخدم ذا طول
وتحدب كبيرين في الاتجاه الأفقي وصغيرين في الاتجاه الرأسي. ويقاس عرض الشعاع بمقدار الزاوية التي تنحصر فيها معظم طاقة
الشعاع وهي تتناسب عكسيا مع التردد وقطر الهوائي فكلما زاد التردد والقطر كلما قلت
الزاوية وزادت دقة تحديد الهدف. وعادة ما تقل
زاوية الشعاع بالمستوى الأفقي في معظم الرادارات عن درجة واحدة بينما قد تصل
لعشرات الدرجات في المستوى الرأسي.

وفي بعض التطبيقات كالأرصاد الجوية وأنظمة تتبع الصواريخ والاستشعار عن بعد يتطلب أن يكون عرض الشعاع ضيق جدا في المستويين وفي هذه الحالة يمكن استخدام هوائيات صحنية دائرية كتلك المستخدمة في أنظمة الاتصالات. ويتم في معظم أنواع الرادار تدوير الهوائي ميكانيكيا حول محور رأسي في جميع الاتجاهات وذلك لمسح (scan) الفضاء المحيط بالرادار بحثا عن الأهداف المنشودة وقد تتراوح سرعة الدوران من عدة دورات في الدقيقة كما في رادارات الأرصاد الجوية وقد تصل لعدة عشرات من الدورات في الدقيقة في الأنظمة المضادة للصواريخ. وفي الرادار النبضي يستخدم في الغالب الهوائي نفسه للإرسال والاستقبال وهذا يتطلب وجود ما يسمى بالمبدل التناوبي
(Duplexer) والذي يقوم بربط المرسل بالهوائي عند الإرسال
بينما يكون المستقبل معزولا تماما عن المرسل وإلا احترق بسبب القدرة الهائلة
للإشارة المرسلة وبعد انتهاء الإرسال يتم ربط الهوائي بالمستقبل لكي يتمكن من
استقبال الإشارة الضعيفة جدا المرتدة من الأهداف. وعند استلام الإشارة تقوم دوائر
إلكترونية بمعالجة الإشارة المستلمة واستخلاص المعلومات المتعلقة بالهدف وإظهارها
على شاشة العرض وفي الأنواع الحديثة تتم عملية المعالجة بالكامل باستخدام معالجات
الإشارات الرقمية ويتم التحكم بكامل عمل الرادار بالحواسيب والمتحكمات الدقيقة (microcontrollers).
وأما شاشة العرض الأكثر استعمالا في الرادارات فهي ما يسمى بمؤشر الموقع التخطيطي
(plan position
indicator (PPI) وهي عبارة عن أنبوبة أشعة مهبطية
كتلك المستخدمة في التلفزيونات ولكن لها شكل دائري وتظهر الأهداف على الشاشة على
شكل نقاط مضيئة. ويظهر موقع الرادار في مركز الشاشة ويتم تدريج محيطها بالزاوية
الأفقية لتحديد اتجاه الهدف بينما يتم رسم دوائر متعددة حول مركز الشاشة لتبيِن المسافة بالميل أو بالكيلومتر حيث أن المسافة
بين نقطة الهدف ومركز الشاشة هي مقدار بعد الهدف عن الرادار. وفي الرادارات ثنائية
الأبعاد تكون ارتفاعات الأهداف البعيدة الظاهرة على الشاشة أعلى منها في الأهداف
القريبة وذلك بسبب تحدب الأرض وبسبب أن
شعاع الرادار يتم إمالته بزاوية معينة عن سطح الأرض. وفي حالة عدم توفر رادار من
نوع دوبلر لقياس سرعة الهدف يمكن تحديد سرعة الهدف بشكل تقريبي من خلال قياس الوقت
الذي تستغرقه النقطة لتقطع مسافة معينة على شاشة الرادار. ولقد طرأت تحسينات كثيرة
على شاشات الرادار حيث يمكن إظهار كثير من المعلومات عن الهدف بشكل رقمي توضع عند
أطراف الشاشة. أما المزامن وهو عبارة عن إشارات توقيتية تضبط سرعة دوران الهوائي
وتغذى إلى شاشة العرض لكي يتم إظهار الهدف في المكان المناسب على الشاشة وذلك
لتحديد الزاوية الأفقية لموقع الهدف.
وفي بعض التطبيقات كالأرصاد الجوية وأنظمة تتبع الصواريخ والاستشعار عن بعد يتطلب أن يكون عرض الشعاع ضيق جدا في المستويين وفي هذه الحالة يمكن استخدام هوائيات صحنية دائرية كتلك المستخدمة في أنظمة الاتصالات. ويتم في معظم أنواع الرادار تدوير الهوائي ميكانيكيا حول محور رأسي في جميع الاتجاهات وذلك لمسح (scan) الفضاء المحيط بالرادار بحثا عن الأهداف المنشودة وقد تتراوح سرعة الدوران من عدة دورات في الدقيقة كما في رادارات الأرصاد الجوية وقد تصل لعدة عشرات من الدورات في الدقيقة في الأنظمة المضادة للصواريخ. وفي الرادار النبضي يستخدم في الغالب الهوائي نفسه للإرسال والاستقبال وهذا يتطلب وجود ما يسمى بالمبدل التناوبي
8-6 استخدامات الرادار
تستخدم الرادارات في تطبيقات لا حصر لها ولقد أدى
استخدامها في كثير من هذه التطبيقات في تحسين آدائها بل إن تعطل الرادارات فيها قد
يؤدي لشلل تام في عملها كما في أنظمة الملاحة الجوية والبحرية. وتنحصر مهام الرادارات
في التطبيقات المختلفة في أربعة مهام رئيسية وهي المراقبة (surveillance) والتتبع (tracking)
والتصوير الراداري (radar imaging)
واختراق الأرض لكشف ما تحت سطحها (ground
pentration). وفي كل تطبيق توجد أنواع لا حصر لها من الرادارات
حيث تتفاوت في أحجامها وفي الترددات المستخدمة وطرق المسح ونوع الهوائيات وطرق
معالجة الإشارات وهذا بالتالي ينعكس على أثمانها التي تتراوح بين عدة مئات من
الدولارات وملايين الدولارات.
الاستخدامات العسكرية


رادارات الملاحة الجوية

لقد أصبح الرادار أداة مهمة لا غنى عنها في
الملاحة الجوية فقد أسهم استخدامه في المطارات وكذلك في الطائرات في استغلال
المطارات بكفاءة عالية من خلال زيادة عدد الطائرات القادمة والمغادرة وكذلك الحد من حوادث الطائرات أثناء سيرها في
الجو أو عند إقلاعها وهبوطها. ويستخدم في أنظمة التحكم بحركة الطائرات (Air traffic control (ATC) أنواع مختلفة من الرادارات بعضها بعيد المدى
وبعضها قصير المدى وذلك لتتبع حركة الطائرات المدنية في الجو وإرشادها أثناء
طيرانها بين المطارات حيث تظهر الموجات المنعكسة عن الطائرات كنقاط مضيئة على شاشة
الرادار. ويمكن تحديد مسار الطيران لكل طائرة من خلال متابعة حركات هذه النِقاط
على الشاشة ضمن دائرة قد يصل نصف قطرها إلى ثمانين كيلومتر. ويقوم المراقبون الجويون
المتواجدون في أبراج المراقبة من خلال شاشات الرادارات بتوجيه التدفق المستمر
للطائرات القادمة والمغادرة من خلال اختيار أنسب المسارات للطائرات وتحديد زمن
إقلاعها وهبوطها وكذلك مساعدة الطيارين عند الهبوط في حالة الطقس الرديء. ويمكن للأنواع
الحديثة من الرادارات المسماة برادار
المراقبة الثانوي (Secondary Surveillance Radar (SSR)) أن تتعرف على هوية
الطائرة من خلال نظام اتصالات يتراسل مع جهاز آلي تحمله الطائرة يسمى المستجيب (transponder)
يقوم بتزويد المطار بالمعلومات اللازمة عن الطائرة. ويقوم رادار الاقتراب الدقيق (Precision approach radar (PAR)) وبمساعدة برج
المراقبة الطائرات على الهبوط بشكل آمن على مدرج المطار خاصة في الأحوال السيئة. ويوجد
في معظم الطائرات الحديثة أنواع مختلفة من الرادارات تساعد الطيار أثناء الطيران
وعند الإقلاع والهبوط فعلى سبيل المثال يستخدم
رادار مقياس الارتفاع (radar altimeter) لتحديد ارتفاع الطائرة عن
سطح تضاريس الأرض وخاصة عند الإقلاع والهبوط. ويوجد في الطائرات أيضا رادارات توضع
في مقدمة الطائرة لمعرفة الأحوال الجوية في مسار الطائرة وذلك لمساعدة الطيار على
تجنب الأحوال السيئة واتخاذ القرارات المناسبة عند الهبوط.
رادارات الملاحة البحرية
![]()


يستخدم الرادار على نطاق واسع في مختلف أنواع
السفن وناقلات النفط والبوارج الحربية
وحاملات الطائرات حيث يقوم الرادار بتحديد أماكن السفن الأخرى في عرض البحر وكذلك تحديد أماكن الشواطئ والجزر الصغيرة والصخور والجبال الثلجية التي
تعترض طريقا مما يجنبها الاصطدام بها. وفي
الموانئ يستخدم الرادار لكشف وجود السفن وتحديد بعدها في المياه
المحيطة بالميناء وذلك لتنظيم دخولها وخروجها من الميناء. إن تصميم رادارات الملاحة البحرية أصعب
بكثير من تلك التي في الملاحة الجوية بسبب كون الهدف ملاصقا لسطح الماء وبارتفاعات
قليلة نسبيا وكذلك فإن الهدف يبدأ بالاختفاء تدريجيا عن نظر الرادار بسبب تكور
الأرض. وعادة ما يتم استخدام رادارات بترددات منخفضة نسبيا تقل عن واحد جيقاهيرتز
وذلك لتقليل امتصاص الموجات من قبل الماء والتي تنتشر ملاصقة لسطحه. ولا يتجاوز
أقصى مدى لهذه الرادارات المائة كيلومتر بسبب تكور الأرض كما ذكرنا وعادة ما يتم
وضع الرادار على أبراج عالية لزيادة مدى رؤيتها.
رادارات الطقس (Weather Radars)

الاستشعار عن بعد (Remote sensing)

تستخدم الرادارات المحمولة بالأقمار
الصناعية والطائرات لدراسة سطح الأرض وما
عليه من مكونات وذلك
من خلال إرسال نبضات كهرومغناطيسية بترددات معينة ومن ثم التقاط النبضات المرتدة
عن سطح الأرض والقيام بتحليلها باستخدام معالجات الإشارات الرقمية لرسم صور عن
المنطقة الممسوحة. وتستخدم هذه الصور لاستخلاص معلومات مهمة عن طبيعة الأرض التي
تم مسحها من قبل شعاع الرادار ومن هذه المعلومات طبيعة التضاريس الأرضية وطبوغرافيتها
ونوع الغابات والنباتات والمحاصيل
المزروعة والآفات الزراعية والظروف المناخية والبيئية والبراكين والأعاصير والفياضانات
والثروات المعدنية والمياه الجوفية والبترول . ويوجد أنواع مختلفة من رادارات
الاستشعار عن بعد يتم تصميمها بناءا على نوع المعلومات المراد استشعارها وغالبا ما
يعتمد هذا على مقدار التردد المستخدم في الرادار فالبحث عن ثروات الأرض يتطلب
استخدام ترددات تقل عن واحد جيقاهيرتز وذلك لقدرتها على اختراق سطح الأرض بينما
يتطلب رسم خارطة طبوغرافية ترددادت أعلى من ذلك بكثير للحصول قدرة تمييز عالية لتضاريس الأرض.
الرادار الخارق للأرض ((Ground
Penetrating Radar


وتستخدم الرادارات
في تطبيقات أخرى يصعب حصرها حيث تستخدمه
الشرطة في قياس سرعة المركبات على الطرق لضمان عدم تجاوزها السرعات المقررة.
وتستخدم في أنظمة الكشف والمتابعة الفضائية حيث تقوم الرادارات بتوجيه الصواريخ
الحاملة للأقمار الصناعية والمركبات الفضائية منذ انطلاقها إلى أن تضعها في مداراتها
وتقوم بمراقبة الأقمار الصناعية والتأكد من بقائها في المواقع المخصصة لها في
مداراتها. وتستخدم بعض أنواع الرادارات
البسيطة في المركبات الحديثة لتنبيه وتحذير السائق عند الاقتراب الشديد لمركبته من
المركبات الأخرى والأرصفة والحواجز وذلك لتجنيبه الاصطدام بها. وتستخدم كذلك في
مراقبة ومتابعة الأجسام التي تأتي من الفضاء الخارجي وتقترب من الأرض كالمذنبات
والشهب والنيازك وغيرها. وقد تم استخدام الرادار لدراسة سطح القمر ومعرفة كامل
تضاريسه قبل إرسال المركبات الفضائية إليه وهبوطها عليه. وتستخدم الرادارات في بعض
أنظمة الإنسان الآلي المتحركة وفي المركبات التي تم إنزالها على أسطح الكواكب
لتجنيبها الاصطدام بما حولها من أجسام.
من كتاب (مدخل إلى الهندسة الكهربائية) \ منصور العبادي
يطلب من:
http://jamalon.com/ar/catalog/product/view/id/18928174/
يطلب من:
شكرا
ردحذف